科普阅读题 适中0.65 引用1 组卷265
阅读短文,回答问题:
超声波加湿器通电工作时,雾化片产生每秒170万次的高频率振动,将水抛离水面雾化成大量1~5μm的超微粒子(水雾),吹散到空气中使空气湿润,改变空气的湿度。
如图所示是某型号超声波加湿器,下表为其部分技术参数,其中额定加湿量是指加湿器正常工作1h雾化水的体积;循环风量是指加湿器正常工作1h通过风扇的空气体积;加湿效率是指实际加湿量和实际输入功率的比值。

(1)人耳______ (填“能”或“不能”)听到超声波;
(2)加湿器正常工作时的电流为______ A,加满水后最多能加湿______ h;
(3)在没有其他用电器接入电路的情况下,加湿器工作30min,标有“3000imp/(kW·h)”的电能表指示灯闪烁了600次。此过程中加湿器消耗的电功率为______ W,此时加湿器的实际加湿量至少为______ L/h;
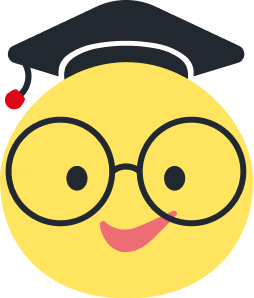
(4)利用湿敏电阻可实现对环境湿度的精确测量。如图乙所示,电源电压为24V,定值电阻R的阻值为140Ω,湿敏电阻的阻值 随湿度RH变化的关系图线如图丙所示。当电路中电流为80mA时,电表均未超过量程,则此时的环境湿度为
随湿度RH变化的关系图线如图丙所示。当电路中电流为80mA时,电表均未超过量程,则此时的环境湿度为______ %。
超声波加湿器
超声波加湿器通电工作时,雾化片产生每秒170万次的高频率振动,将水抛离水面雾化成大量1~5μm的超微粒子(水雾),吹散到空气中使空气湿润,改变空气的湿度。
如图所示是某型号超声波加湿器,下表为其部分技术参数,其中额定加湿量是指加湿器正常工作1h雾化水的体积;循环风量是指加湿器正常工作1h通过风扇的空气体积;加湿效率是指实际加湿量和实际输入功率的比值。
型号 | ××× | 额定加湿量 | 10L/h |
额定电压 | 220V | 额定输入功率 | 440W |
水箱容量 | 25L | 循环风量 |
|
加湿效率 |
| 轮子与地面接触的总面积 |
|
净重 | 95kg | — | |



(2)加湿器正常工作时的电流为
(3)在没有其他用电器接入电路的情况下,加湿器工作30min,标有“3000imp/(kW·h)”的电能表指示灯闪烁了600次。此过程中加湿器消耗的电功率为
(4)利用湿敏电阻可实现对环境湿度的精确测量。如图乙所示,电源电压为24V,定值电阻R的阻值为140Ω,湿敏电阻的阻值
随湿度RH变化的关系图线如图丙所示。当电路中电流为80mA时,电表均未超过量程,则此时的环境湿度为2023·广东东莞·二模
知识点:根据欧姆定律计算导体的电阻、电流及电压利用电能表的主要参数计算电能电功率的定义式P=W/t的应用电功率的计算式P=UI及推导式的应用超声波和次声波 答案解析 【答案】很抱歉,登录后才可免费查看答案和解析! 立即登录
类题推荐
阅读短文,回答问题
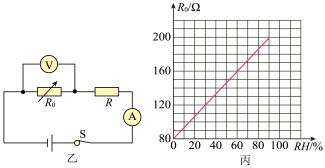
如图甲所示是一款智能消毒机器人,机器人由超干雾喷头、紫外线灯、底盘等组成。
超干雾喷头通过超声波将消毒剂雾化成直径1μm以下的微小雾粒,这种雾粒可以长时间悬浮在空气中。
机器人身上搭载了许多感知外界环境的测距仪。视觉传感测距仪由投射器发出激光,根据接收到较强的反射光成像,判断障碍物的形状、体积以及到机器人的距离,当接收到的反射光比较弱时,就由超声波测距传感器通过反射回的超声波判断到障碍物的距离。
当剩余电量减为电池容量的10%时,机器人会主动寻找充电桩充电,下表为该款智能消毒机器人的部分参数。其中电池容量是指放电电流与放电总时间的乘积,最大雾化率是指每分钟最多雾化的液体体积。消毒喷雾量是机器人消毒时每立方米空间超干雾喷头喷出雾状消毒剂的总体积。
(1)超干雾喷头雾化消毒剂,是因为超声波能够传递______ (选填信息或能量),使消毒液体剧烈______ 打散成微小雾粒;
(2)下列关于该款智能消毒机器人的说法中,正确的是______ ;
A.本次理化测试卷纸的厚度大于雾粒的直径
B.开启紫外线灯消毒模式一般是白天人多时
C.遇到透明玻璃时主要通过视觉传感器避障
D.匀速转弯时智能消毒机器人处于平衡状态
(3)已知门诊大厅的容积为1000m3,如果仅用雾化消毒剂的方式进行消毒,至少需要______ kg消毒剂(消毒剂的密度为1.1g/cm3),至少经过______ min才能消完毒;
(4)机器人主动寻找到充电桩充电,3h后充满,不计能量损失,则充电时的电流是______ A,充满电后,机器人边消毒边以最大速度沿直线移动,180s后电池储存能量减少0.1%,电池减少能量的80%用于克服阻力做功,此过程中机器人受到的阻力为______ N;
(5)当障碍物未能被测距仪捕捉到,机器人的底盘前端碰撞板就会受到碰撞,板内压力传感器向控制系统传达信息,从而根据碰撞的力度和方向做出相应的反应。如图乙是压力传感电路原理图,电源电压为14.4V,定值电阻R1=120Ω.当电路中的电流大于等于50mA时,气电保护开关S自动断开,机器人停止前进,图丙所示是压力传感器R的阻值随所受压力F变化图像。当压力传感器受到的压力增大时,其两端的电压______ (选填增大、不变或减小);当机器人的前端被碰撞,传感器R受到压力达到______ N时,气电开关将断开。
智能消毒机器人
如图甲所示是一款智能消毒机器人,机器人由超干雾喷头、紫外线灯、底盘等组成。
超干雾喷头通过超声波将消毒剂雾化成直径1μm以下的微小雾粒,这种雾粒可以长时间悬浮在空气中。
机器人身上搭载了许多感知外界环境的测距仪。视觉传感测距仪由投射器发出激光,根据接收到较强的反射光成像,判断障碍物的形状、体积以及到机器人的距离,当接收到的反射光比较弱时,就由超声波测距传感器通过反射回的超声波判断到障碍物的距离。
当剩余电量减为电池容量的10%时,机器人会主动寻找充电桩充电,下表为该款智能消毒机器人的部分参数。其中电池容量是指放电电流与放电总时间的乘积,最大雾化率是指每分钟最多雾化的液体体积。消毒喷雾量是机器人消毒时每立方米空间超干雾喷头喷出雾状消毒剂的总体积。
| 机器人输入电压 | 50V | 充电桩输出电压 | 50V |
| 电池容量 | 45Ah | 最大雾化率 | 50mL/min |
| 运行模式 | 连续运动 | 消毒喷雾量 | 20mL/m3 |
| 移动速度 | 0.1~1m/s | ———————————— | |
(2)下列关于该款智能消毒机器人的说法中,正确的是
A.本次理化测试卷纸的厚度大于雾粒的直径
B.开启紫外线灯消毒模式一般是白天人多时
C.遇到透明玻璃时主要通过视觉传感器避障
D.匀速转弯时智能消毒机器人处于平衡状态
(3)已知门诊大厅的容积为1000m3,如果仅用雾化消毒剂的方式进行消毒,至少需要
(4)机器人主动寻找到充电桩充电,3h后充满,不计能量损失,则充电时的电流是
(5)当障碍物未能被测距仪捕捉到,机器人的底盘前端碰撞板就会受到碰撞,板内压力传感器向控制系统传达信息,从而根据碰撞的力度和方向做出相应的反应。如图乙是压力传感电路原理图,电源电压为14.4V,定值电阻R1=120Ω.当电路中的电流大于等于50mA时,气电保护开关S自动断开,机器人停止前进,图丙所示是压力传感器R的阻值随所受压力F变化图像。当压力传感器受到的压力增大时,其两端的电压

 )电动机。当电磁铁线圈中的电流为50mA时,衔铁刚好被吸下,动触点b与静触点α接触,电动机开始工作,玻璃门被打开。红外线传感器R的电阻随人体到大门的距离L的变化关系如图丙所示。
)电动机。当电磁铁线圈中的电流为50mA时,衔铁刚好被吸下,动触点b与静触点α接触,电动机开始工作,玻璃门被打开。红外线传感器R的电阻随人体到大门的距离L的变化关系如图丙所示。
组卷网是一个信息分享及获取的平台,不能确保所有知识产权权属清晰,如您发现相关试题侵犯您的合法权益,请联系组卷网