实验题 适中0.65 引用2 组卷618
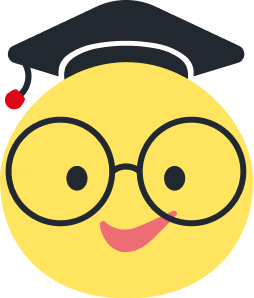
某同学利用图甲中的实验装置探究机械能变化量与力做功的关系,所用器材有:一端带滑轮的长木板、轻细绳、200g的钩码若干,质量为2kg的滑块、打点计时器、刻度尺,已知当地重力加速度为 。实验操作步骤如下:
。实验操作步骤如下:
(1)如甲图安装器材,保持桌面、长木板水平,轻细绳下端悬挂5个钩码,调整装置,使细绳水平。
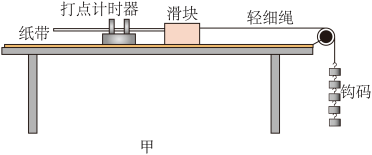
(2)接通打点计时器电源,交流电频率为50Hz,再释放滑块,得到一条纸带如乙图,将纸带上打出的第一个点标记为0计数点,再依次取计数点1、2、3、4、5、6,每两个计数点之间有4个点未画出,测出各点到0点之间的距离如乙图,单位为cm。
(3)从0点到5点系统(以桌面上滑块和悬挂的钩码为系统,下同)的重力势能的减少量为______ J。(计算结果均保留小数点后两位,下同)
(4)从纸带数据可计算出经过5点的瞬时速度
______ m/s。
(5)从0点到5点系统动能的增加量为______ J,系统机械能的减少量为______ J。
(6)若物块与木板之间的动摩擦因数为0.24,则从0点到5点物块克服木板的摩擦力做的功为______ J。
(7)从上述结果可得出的实验结论是______ 。
。实验操作步骤如下:(1)如甲图安装器材,保持桌面、长木板水平,轻细绳下端悬挂5个钩码,调整装置,使细绳水平。
(2)接通打点计时器电源,交流电频率为50Hz,再释放滑块,得到一条纸带如乙图,将纸带上打出的第一个点标记为0计数点,再依次取计数点1、2、3、4、5、6,每两个计数点之间有4个点未画出,测出各点到0点之间的距离如乙图,单位为cm。
(3)从0点到5点系统(以桌面上滑块和悬挂的钩码为系统,下同)的重力势能的减少量为
(4)从纸带数据可计算出经过5点的瞬时速度
(5)从0点到5点系统动能的增加量为
(6)若物块与木板之间的动摩擦因数为0.24,则从0点到5点物块克服木板的摩擦力做的功为
(7)从上述结果可得出的实验结论是
22-23高三上·安徽·阶段练习
类题推荐
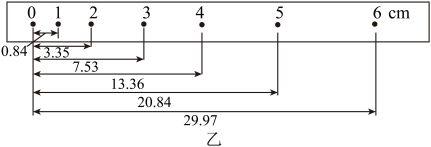
某同学利用图甲中的实验装置探究物体的机械能变化量与外力做功的关系。所用器材有:一端带滑轮的长木板、轻细绳、50 g的钩码若干、光电门2个、数字计时器、带遮光条的滑块(质量为200 g,其上可放钩码)、刻度尺。g取9.80 m/s2。实验操作步骤如下:

①安装器材,调整两个光电门距离为50.00cm,轻细绳下端悬挂4个钩码,如图甲所示;
②接通电源,释放滑块,分别记录遮光条通过两个光电门的时间,并计算出滑块通过两个光电门时的速度;
③保持绳下端悬挂4个钩码不变,在滑块上依次增加一个钩码,记录滑块上所载钩码的质量,重复上述步骤;
④完成5次测量后,计算出每次实验中滑块及所载钩码的总质量m、系统(包含滑块、滑块所载钩码和轻细绳悬挂钩码)总动能的增加量 及系统总机械能的减少量ΔE,结果如下表所示。
及系统总机械能的减少量ΔE,结果如下表所示。
(1)实验中轻细绳所悬挂钩码重力势能的减少量为___________ J(保留三位有效数字)。
(2)步骤④中的表格所缺数据为___________ 。 若忽略滑轮和绳子之间的摩擦力做功,求滑块与木板之间的动摩擦因数为___________ 。(保留两位有效数字)
①安装器材,调整两个光电门距离为50.00cm,轻细绳下端悬挂4个钩码,如图甲所示;
②接通电源,释放滑块,分别记录遮光条通过两个光电门的时间,并计算出滑块通过两个光电门时的速度;
③保持绳下端悬挂4个钩码不变,在滑块上依次增加一个钩码,记录滑块上所载钩码的质量,重复上述步骤;
④完成5次测量后,计算出每次实验中滑块及所载钩码的总质量m、系统(包含滑块、滑块所载钩码和轻细绳悬挂钩码)总动能的增加量
及系统总机械能的减少量ΔE,结果如下表所示。| m/kg | 0.200 | 0.250 | 0.300 | 0.350 | 0.400 |
| /J | 0.587 | 0.490 | 0.392 | 0.294 | 0.195 |
| ΔE/J | 0.393 | 0.490 | 0.686 | 0.785 |
(2)步骤④中的表格所缺数据为
利用图1所示装置探究机械能变化量与力做功的关系,实验器材:一端附滑轮的长木板、轻细绳、50g钩码若干、光电门(2个)、数字计时器、带遮光条的滑块(质量为200g,其上可放置钩码)、刻度尺。当地重力加速度为9.8m/s2,实验步骤如下:
①安装器材,调整两个光电门距离为50.0cm,轻细绳下端悬挂4个钩码,如图1所示;
②接通电源,释放滑块,分别记录遮光条通过两个光电门的时间,并计算出滑块通过两个光电门的速度;
③保持绳下端悬挂4个钩码不变,在滑块上依次增加1个钩码,记录滑块上所载钩码的质量,重复上述步骤;
④完成5次测量后,计算出每次实验中滑块及所载钩码的总质量m、系统(包含滑块、滑块所载钩码和轻细绳悬挂钩码)动能的增加量Ek及系统机械能的减少量E,结果如下表所示。
(1)实验中轻细绳所悬挂钩码的重力势能的减少量为___________ J(保留三位有效数字);
(2)步骤④中的表格所缺数据为___________ 。
(3)以m为横轴、E为纵轴,在图2中描绘出E—m图像( ) ;若不计轻细绳与滑轮之间的摩擦力做功,则滑块与木板之间的动摩擦因数为___________ (保留两位有效数字)。
①安装器材,调整两个光电门距离为50.0cm,轻细绳下端悬挂4个钩码,如图1所示;
②接通电源,释放滑块,分别记录遮光条通过两个光电门的时间,并计算出滑块通过两个光电门的速度;
③保持绳下端悬挂4个钩码不变,在滑块上依次增加1个钩码,记录滑块上所载钩码的质量,重复上述步骤;
④完成5次测量后,计算出每次实验中滑块及所载钩码的总质量m、系统(包含滑块、滑块所载钩码和轻细绳悬挂钩码)动能的增加量Ek及系统机械能的减少量E,结果如下表所示。
1 | 2 | 3 | 4 | 5 | |
m/kg | 0.200 | 0.250 | 0.300 | 0.350 | 0.400 |
Ek/J | 0.587 | 0.490 | 0.392 | 0.294 | 0.195 |
E/J | 0.393 | 0.588 | 0.686 | 0.785 |
(2)步骤④中的表格所缺数据为
(3)以m为横轴、E为纵轴,在图2中描绘出E—m图像
某同学利用图甲中的实验装置探究物体的机械能变化量与外力做功的关系。所用器材有:一端带滑轮的长木板、轻细绳、50 g的钩码若干、光电门2个、数字计时器、带遮光条的滑块(质量为200 g,其上可放钩码)、刻度尺。g取9.80 m/s2实验操作步骤如下:

①安装器材,调整两个光电门距离为50.00 cm,轻细绳下端悬挂4个钩码,如图甲所示;
②接通电源,释放滑块,分别记录遮光条通过两个光电门的时间,并计算出滑块通过两个光电门时的速度;
③保持绳下端悬挂4个钩码不变,在滑块上依次增加一个钩码,记录滑块上所载钩码的质量,重复上述步骤;
④完成5次测量后,计算出每次实验中滑块及所载钩码的总质量m、系统(包含滑块、滑块所载钩码和轻细绳悬挂钩码)总动能的增加量 及系统总机械能的减少量ΔE,结果如下表所示。
及系统总机械能的减少量ΔE,结果如下表所示。
(1)实验中轻细绳所悬挂钩码重力势能的减少量为___________ J(保留三位有效数字)。
(2)步骤④中的表格所缺数据为___________ 。
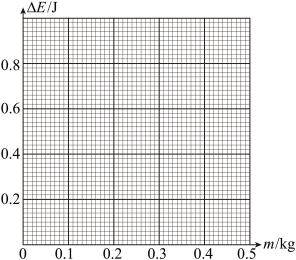
(3)以m为横轴,ΔE为纵轴,选择合适的标度,在图乙中绘出ΔE-m图像。( )

若忽略滑轮和绳子之间的摩擦力做功,求滑块与木板之间的动摩擦因数为___________ 。(保留两位有效数字)
①安装器材,调整两个光电门距离为50.00 cm,轻细绳下端悬挂4个钩码,如图甲所示;
②接通电源,释放滑块,分别记录遮光条通过两个光电门的时间,并计算出滑块通过两个光电门时的速度;
③保持绳下端悬挂4个钩码不变,在滑块上依次增加一个钩码,记录滑块上所载钩码的质量,重复上述步骤;
④完成5次测量后,计算出每次实验中滑块及所载钩码的总质量m、系统(包含滑块、滑块所载钩码和轻细绳悬挂钩码)总动能的增加量
及系统总机械能的减少量ΔE,结果如下表所示。| m/kg | 0.200 | 0.250 | 0.300 | 0.350 | 0.400 |
| /J | 0.587 | 0.490 | 0.392 | 0.294 | 0.195 |
| ΔE/J | 0.393 | 0.490 | 0.686 | 0.785 |
(2)步骤④中的表格所缺数据为
(3)以m为横轴,ΔE为纵轴,选择合适的标度,在图乙中绘出ΔE-m图像。
若忽略滑轮和绳子之间的摩擦力做功,求滑块与木板之间的动摩擦因数为
组卷网是一个信息分享及获取的平台,不能确保所有知识产权权属清晰,如您发现相关试题侵犯您的合法权益,请联系组卷网