实验题 适中0.65 引用2 组卷209
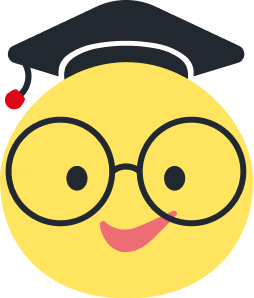
某实验小组利用传感器来探究弹力与弹簧伸长的关系。如图甲所示,先将轻弹簧上端通过力传感器固定在水平的长木板A上,下端自由下垂,将距离传感器轻轻靠近轻弹簧下端,当力传感器示数为零时,距离传感器的示数为x0;然后再将轻弹簧下端与距离传感器固定,下面连接轻质木板B,距离传感器可以测量出其到力传感器的距离x,木板B下面用轻细绳挂住一小桶C。
(1)逐渐往小桶C内添加细沙,记录相应的力传感器的示数F和距离传感器的示数x,作出Fx图象如图乙所示。由图及相关信息可知,弹簧的劲度系数k=_____ N/m,弹簧原长L0=_____ cm。
(2)将该弹簧应用到电子秤上,如图丙所示(两根弹簧)。闭合开关S,称不同物体的质量时,滑片P上下滑动,通过电子显示器得到示数。弹簧处于自然伸长状态时,滑片P位于R的最上端,通过验证可知,电子显示器的示数I与物体质量m的关系为m=ak- (a、b均为常数,k为轻弹簧的劲度系数),则滑动变阻器R的长度L=
(a、b均为常数,k为轻弹簧的劲度系数),则滑动变阻器R的长度L=_____ ,电源电动势E=_____ 。(保护电阻和滑动变阻器最大阻值均为R0,电源内阻不计,已知当地重力加速度为g)
(1)逐渐往小桶C内添加细沙,记录相应的力传感器的示数F和距离传感器的示数x,作出Fx图象如图乙所示。由图及相关信息可知,弹簧的劲度系数k=
(2)将该弹簧应用到电子秤上,如图丙所示(两根弹簧)。闭合开关S,称不同物体的质量时,滑片P上下滑动,通过电子显示器得到示数。弹簧处于自然伸长状态时,滑片P位于R的最上端,通过验证可知,电子显示器的示数I与物体质量m的关系为m=ak-
(a、b均为常数,k为轻弹簧的劲度系数),则滑动变阻器R的长度L=2021高三·全国·专题练习
类题推荐
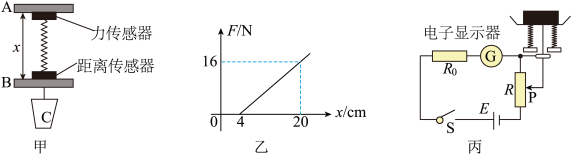
 ,弹簧的劲度系数k=10 N/m,不计一切阻力。求:
,弹簧的劲度系数k=10 N/m,不计一切阻力。求: 的阻值;
的阻值; 与所称物体质量m的关系式。
与所称物体质量m的关系式。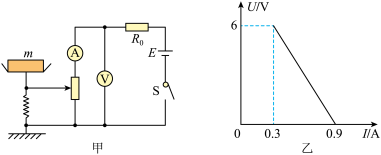
某研究性学习小组的同学设计实验探究轻质弹簧的相关特性。

(1)如图甲所示,将轻质弹簧上端固定于铁架台上,在弹簧下端依次增加钩码的个数,测量出弹簧相应的长度(在弹性限度内),部分数据已填入表格中,由这些数据可得该弹簧的劲度系数k=_______ N/m。(重力加速度g取10m/s2)
(2)如图乙所示,将此轻质弹簧一端固定在水平木板左端的挡板上,另一端紧靠(不粘连)一质量为m、带有挡光片的小滑块,将弹簧压缩到位置P后由静止释放。当光电门到P点的距离x时(x大于弹簧压缩量),测出小滑块上的挡光片通过光电门的时间为 ,已知挡光片的宽度为d,则小滑块到达光电门时的动能表达式为Ek=
,已知挡光片的宽度为d,则小滑块到达光电门时的动能表达式为Ek=____ 。只改变光电门的位置,测出多组数据(每次小滑块都能通过光电门),并作出Ek-x图像如图丙所示。已知该图线斜率的绝对值为k,纵轴截距为b,则可知小滑块与木板间的动摩擦因数为_______ ,释放小滑块时弹簧的弹性势能为________ 。(均用题给物理量字母表示)
(1)如图甲所示,将轻质弹簧上端固定于铁架台上,在弹簧下端依次增加钩码的个数,测量出弹簧相应的长度(在弹性限度内),部分数据已填入表格中,由这些数据可得该弹簧的劲度系数k=
钩码质量(g) | 0 | 50 | 100 | 150 |
弹簧长度(cm) | 6.50 | 8.50 | 10.50 | 12.50 |
(2)如图乙所示,将此轻质弹簧一端固定在水平木板左端的挡板上,另一端紧靠(不粘连)一质量为m、带有挡光片的小滑块,将弹簧压缩到位置P后由静止释放。当光电门到P点的距离x时(x大于弹簧压缩量),测出小滑块上的挡光片通过光电门的时间为
,已知挡光片的宽度为d,则小滑块到达光电门时的动能表达式为Ek=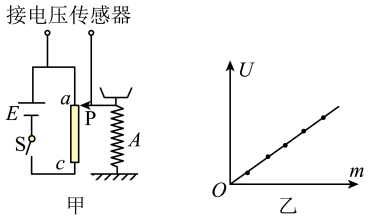
组卷网是一个信息分享及获取的平台,不能确保所有知识产权权属清晰,如您发现相关试题侵犯您的合法权益,请联系组卷网